RAK
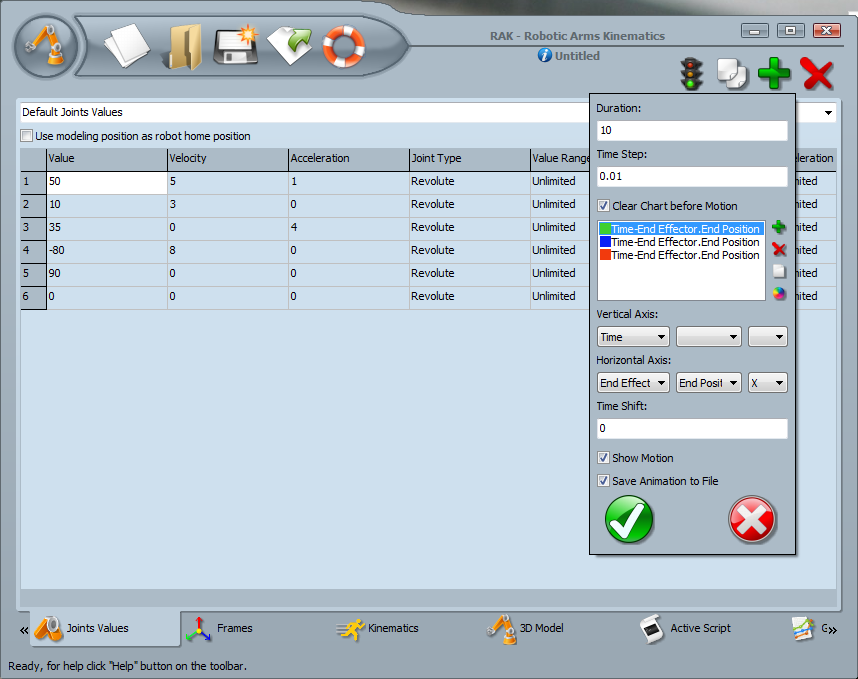
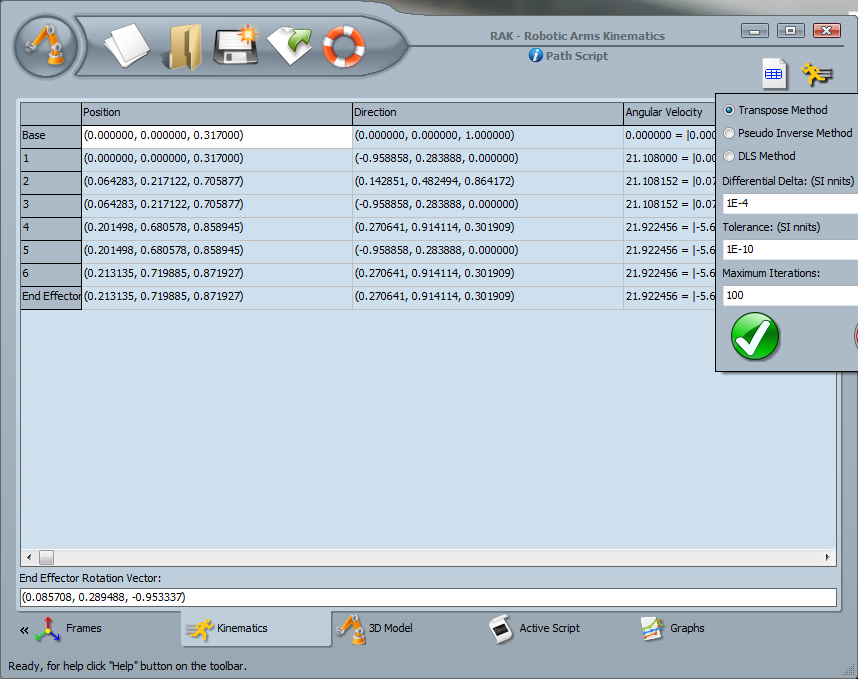
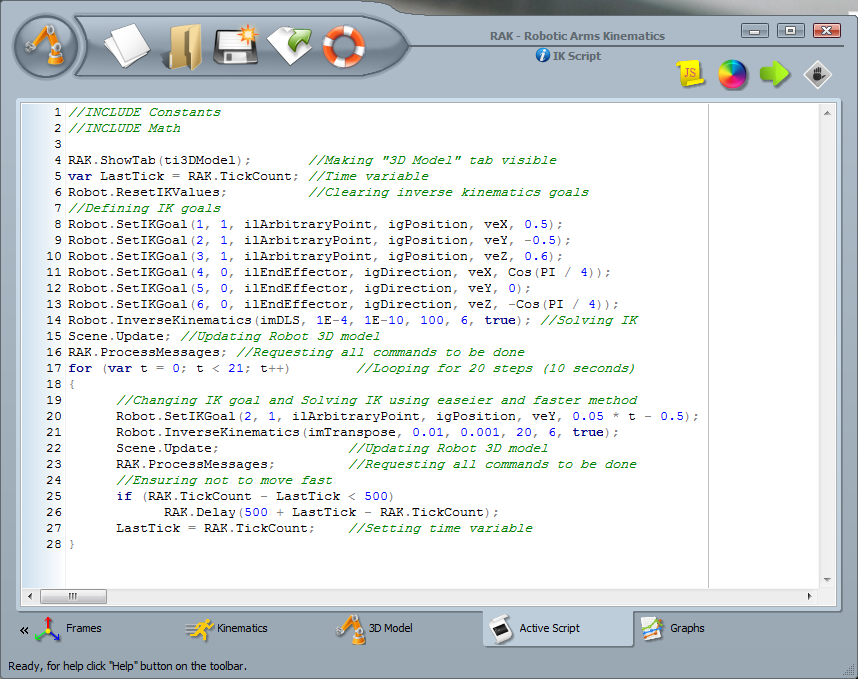
RAK is a computer program to model robotic arms and calculate their kinematics. This program can simulate open loop, single chain robots. You can model a robot by its joints positions or Denavit-Hartenberg (DH) parameters. You can calculate the kinematics and inverse kinematics of the robot by this program. There is also a programming area to write programs and control real robots.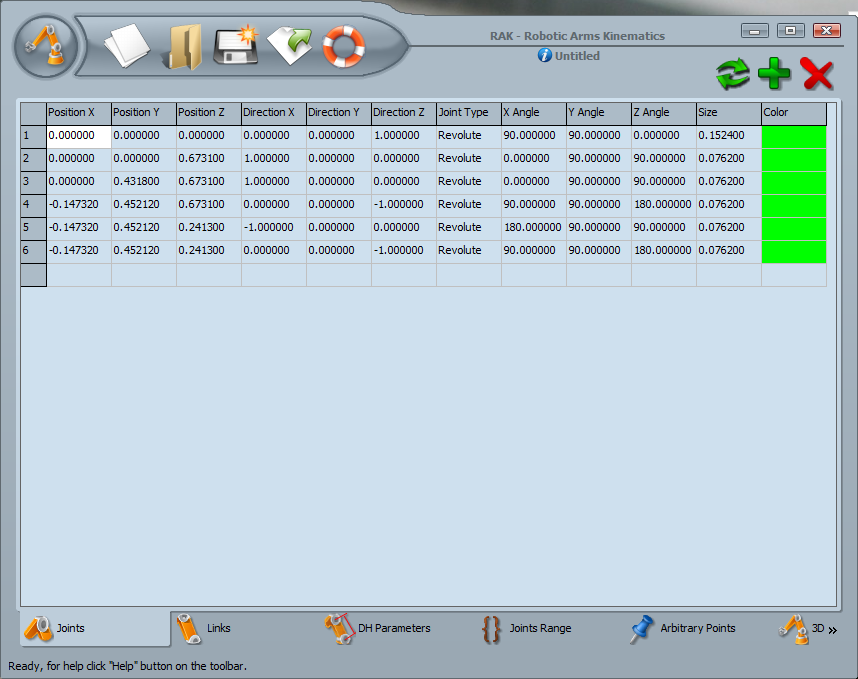


Here are 6 tutorial videos for this application:
Program Information
Latest Version: 1.0.2
Last Update: June 2012
License: Freeware
Tested on: Windows 10, Vista, XP
Download Here
Download RAK Software (11.6 MB) - Mirror - [Report Broken Link]
Download RAK Persian Tutorial (16.0 MB) - Mirror - [Report Broken Link]
Source Code
This program is made by Delphi (non-Unicode versions). If you want to buy the source code, click the below link to add it to your shopping cart. After making the payment the source code will be sent to your email address in 2 days.
Buy RAK Source Code (550 EUR) [€] [تومان]
Buy RAK Source Code (550 EUR) [€] [تومان]



